PaperReading
LiDARsim: Realistic LiDAR Simulation by Leveraging the Real World
June 2020
tl;dr: Generate a map, then place bank of cars on it to create synthetic scenes.
Overall impression
Lidar sim is similar to surfel GAN in generating synthetic dataset with real data collection.
- surfel GAN generates a photorealistic model
- lidar sim focuses on lidar data simulation, which is somewhat easier.
It can allow closed-loop evaluation of the whole AD stack.
Key ideas
- Simulate ray drop patterns with U-Net structure
- Minimum sim2real domain gap.
Technical details
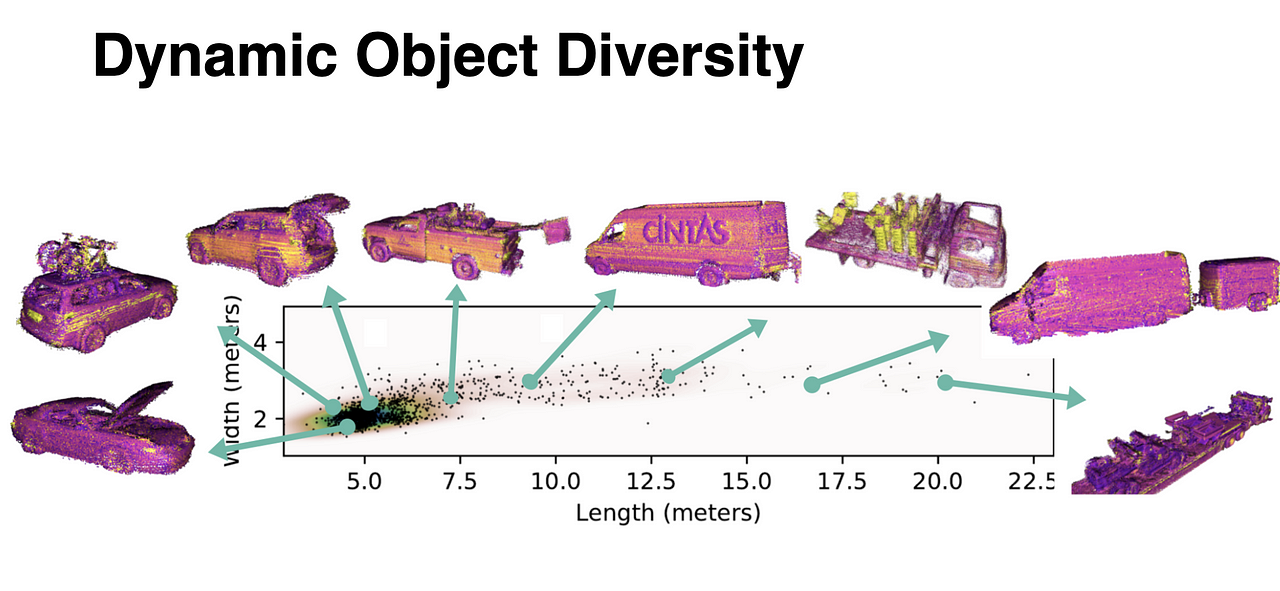
- Chart showing the diversity of cars on the road

Notes
- Questions and notes on how to improve/revise the current work