PaperReading
ForeSeE: Task-Aware Monocular Depth Estimation for 3D Object Detection
October 2019
tl;dr: Train a depth estimator focused on the foreground moving object and improve 3DOD based on pseudo-lidar.
Overall impression
This paper succeeds the line of work in pseudo-lidar (pseudo-lidar, pseudo-lidar++, pseudo-lidar e2e).
Two overall issue with pseudo lidar idea: 1) inaccuracies in depth estimation and 2) blurry edges in depth map leading to edge bleeding. Like pseudo-lidar e2e, ForeSeE also realizes the drawbacks of using an off-the-shelf depth estimator, but instead of finetuning it end-to-end, it focuses on the more important foreground moving objects for 3DOD.
The paper has a good introduction and background session.
However the model seems to have much lower performance (even lower than pseudo-lidar). Email sent to authors to inquire about this. –> This turned out to be a game changer for pseudo-lidar:
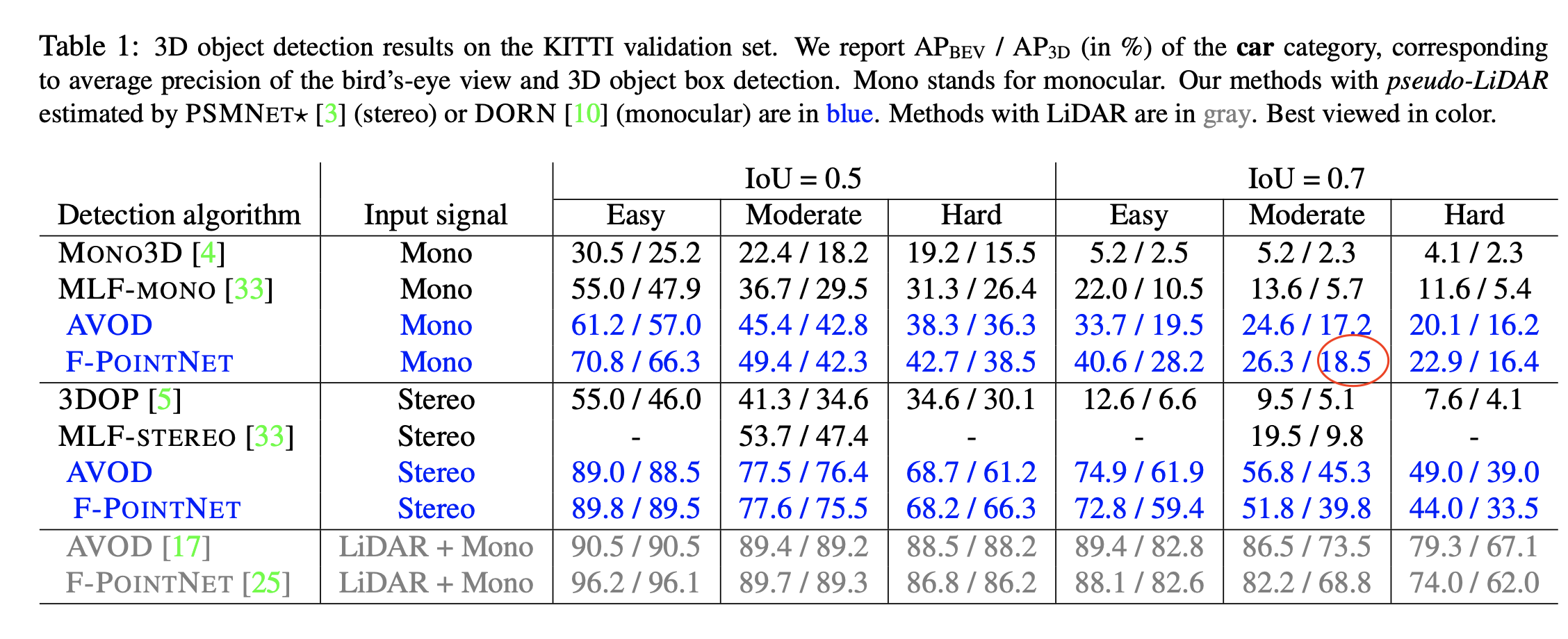
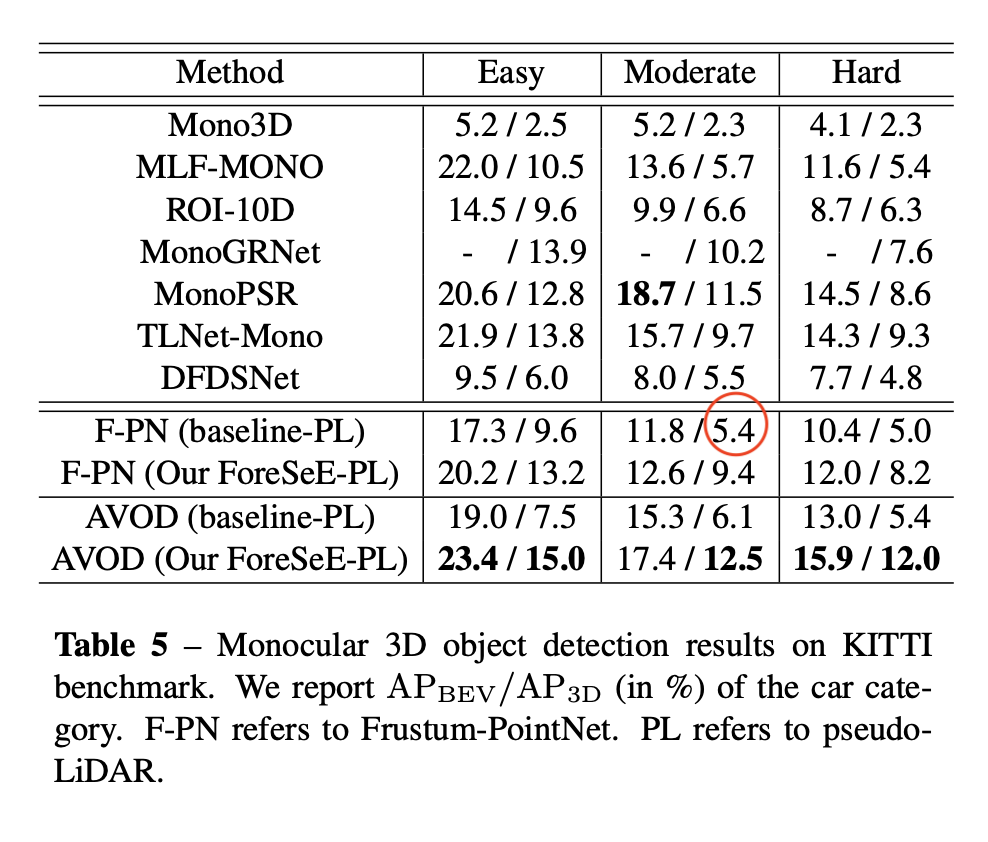
Note that DORN’s training data overlaps with object detection’s validation data, and suffers from overfitting. Both pseudo lidar and pseudo lidar e2e suffer from this problem. According to the ForeSeE paper, if the validation data is excluded from the training of depth map, then PL’s performance drops from 18.5 to 5.4 AP_3D at IoU=0.7.
Key ideas
- Not all pixels are equal. This is particularly true for 3DOD.
Estimation error on a car is much different from the same error on a building.
- FG pixels tend to gather in clusters.
- Depth estimation in bin classification. Depth values are discretized into 100 discrete bins in the log space, instead of directly regression.
- Training with binary mask, weighted sum of L_fg + L_bg.
- During inference, element-wise maximum value of confidence vector in C depth bins are obtained, and pass through a softmax.
Technical details
- Foreground objects are more “bumpy” (non-zero Laplacian, 2nd order derivatives)
Notes
- Why the weight of both branches set to 0.2? I would expect larger than 0.5.
- Why the performance is so low (lower than the original PL paper)